250307-Growth mindset 환경 탓 하지 않기, 두려워 말라!
2025. Mar. Sequence Acquisition Plan: VRClassroom, Studio, SKKU Museum 프로젝트 usecase 예시 만들기
📌 프로젝트 개요
- VRClassroom
- 고정형 멀티뷰 카메라 시스템 (20대 카메라, 4개 캡처 PC)
- 깊이 추정: IVDE 또는 Fusion Depth 활용
- 렌더링: MIV 기반, 4DGS 테스트 가능성 고려
- 목표:
- 고품질의 RGB 영상 취득
- 깊이 데이터 정제
- 카메라 설정 변경 및 Fusion Depth 적용 실험
- Studio
- 고정형 멀티뷰 카메라 시스템 (25대 카메라, 5개 캡처 PC)
- 깊이 추정: IVDE 또는 Fusion Depth
- 렌더링: MIV 기반, 4DGS 테스트 가능성
- 목표:
- 고품질 시퀀스 확보
- 필요 시 조명 문제 해결
- SKKU Museum
- 이동형 로봇 기반 취득 시스템
- Visual SLAM을 사용한 전체 맵핑 → 포인트 클라우드 데이터 생성
- Photogrammetry를 통한 3DGS 기반의 몰입형 장면 렌더링 //
- 목표:
- 박물관 전체 공간 포인트 클라우드 맵핑
- 전시 구역별 몰입형 장면 생성 및 스트리밍 데이터 확보
✅ 주요 포인트
- VRClassroom / Studio / Museum 각 프로젝트의 영상 취득 목표가 다름
- 고정형(20~25대) vs. 이동형 로봇 기반 취득 방식 비교 필요
- 깊이 데이터 정제(Fusion Depth) 및 렌더링 기법(4DGS) 적용 검토
- 신입생/인턴 참여 여부 고려 (VRClassroom 취득 경험 제공 차원에서)
- 박물관 공문 요청 및 데이터 아카이빙 방식 검토 필요
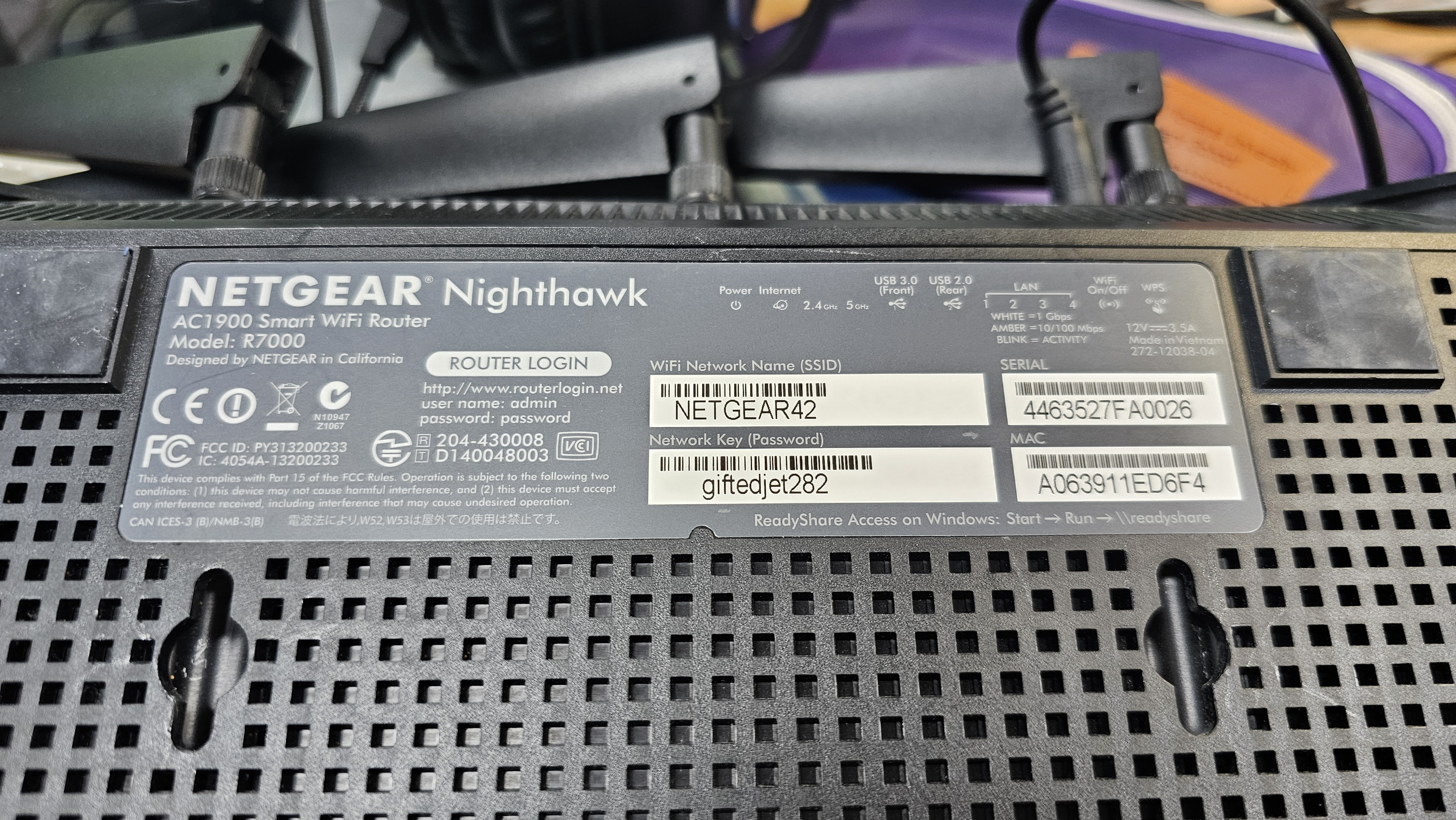
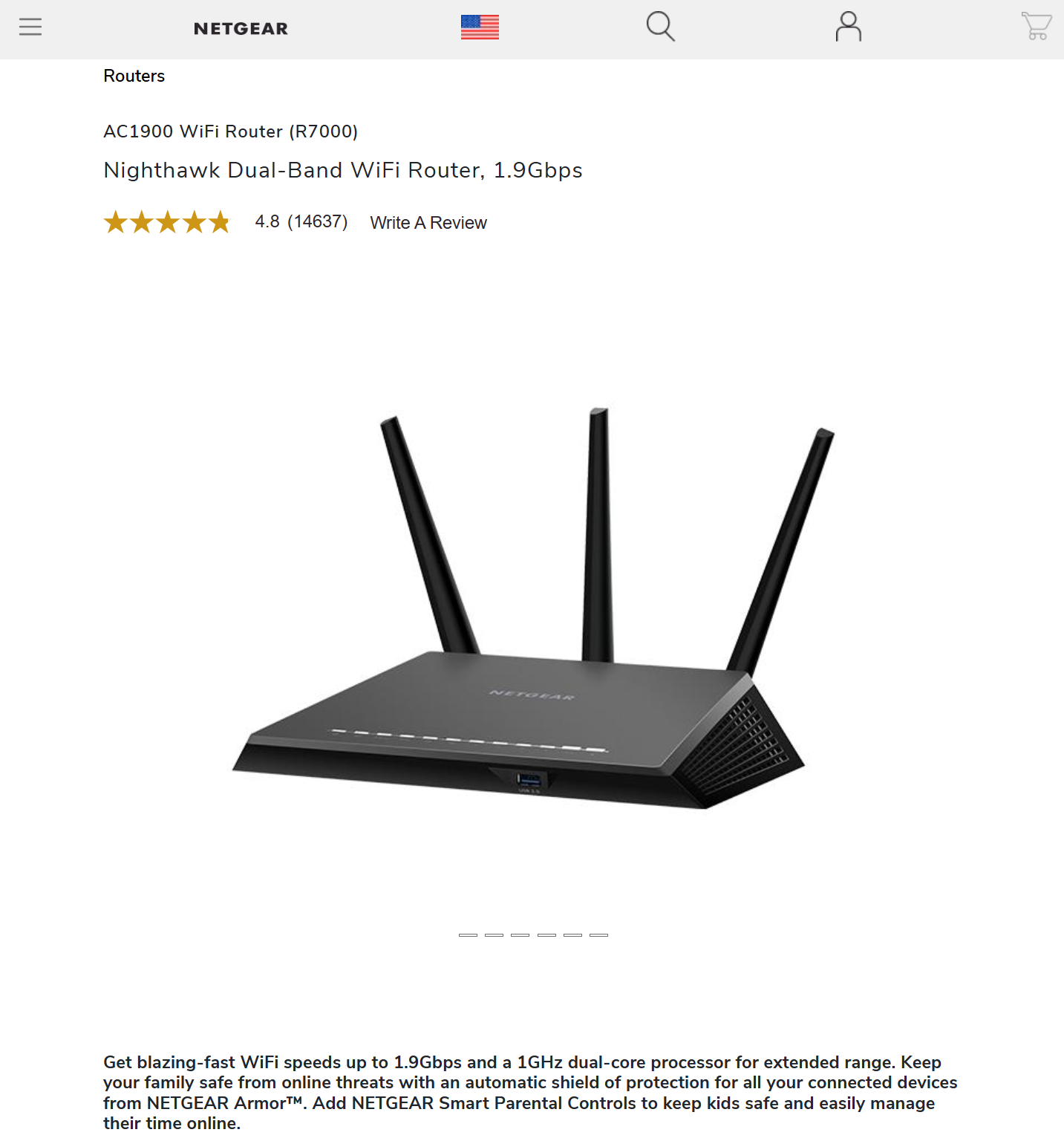
취득 때 사용하라고 교수님께 라우터 Netgear Nighthawk R7000 (AC1900 Smart WiFi Router) 모델을 전달 받았다. 아직 라우터 사용이 친숙하지 않아서 일단 이것으로 네트워크를 설정하고, 동기화된 20-30여대의 카메라에 명령을 내리는 과정을 연습하는 것이 필요한 상황이다. (https://www.netgear.com/home/wifi/routers/r7000/)
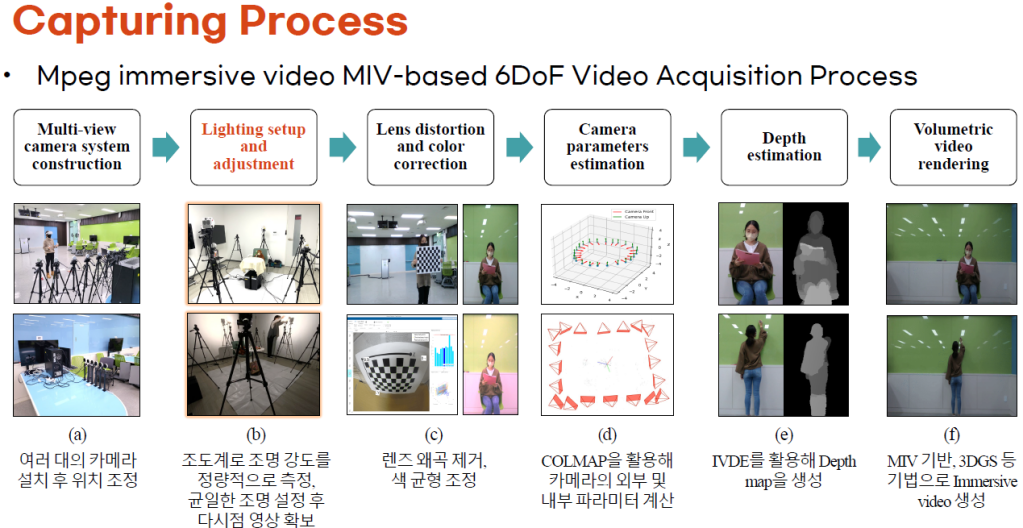
더 나아가 현재 연구실 취득 시스템 파이프라인에서 VRclassroom의 경우 각 베이슬러 카메라마다 Datacolor Spyder Checkr를 가지고 영상을 찍고, 후에 촬영된 영상의 색을 균등하게 보정하기 위해 Color Correction을 해주는 작업이 있는데 20대의 카메라가 있으면 1번 찍기 위해서 20번이 필요하며, 카메라가 천장에 매달려 있기 때문에 노트북으로 촬영 명령을 내리는 사람 1명, 서로 다른 위치에 달려있는 베이슬러 카메라 앞에서 스파이더 체커 보드를 들고 있는 사람. 초기 세팅이 필요하기 때문에 적어도 2-3명의 작업자가 팀으로 함께 해야하는 부분이 있다. 물적 인적 자원을 줄이고 취득을 할 수 있는 방향으로 시스템을 개선하고 싶다.
또한 스튜디오가 홍대, 성균관대로 나뉘면서 컬러 체커 차트가 1개 더 필요한 상황인데 교수님께서 1개 더 구입하는 것을 허락하신 상황이다. 이왕이면 정확한 영상 컬러와 노출을 맞출 수 있는 23년 12일에 출시된 Datacolor SpyderCheckr Video 제품을 구입하면 좋을 것 같다. (http://s.godo.kr/2o8ai)

Leave a comment