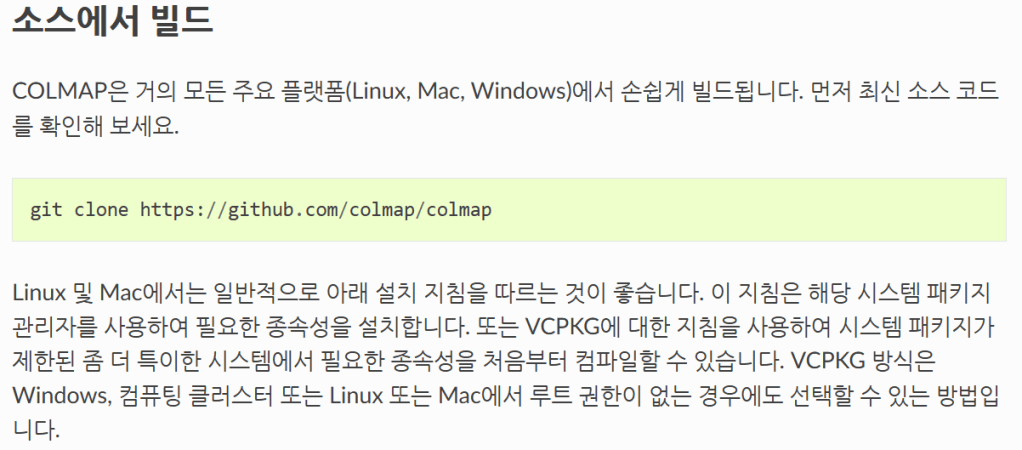
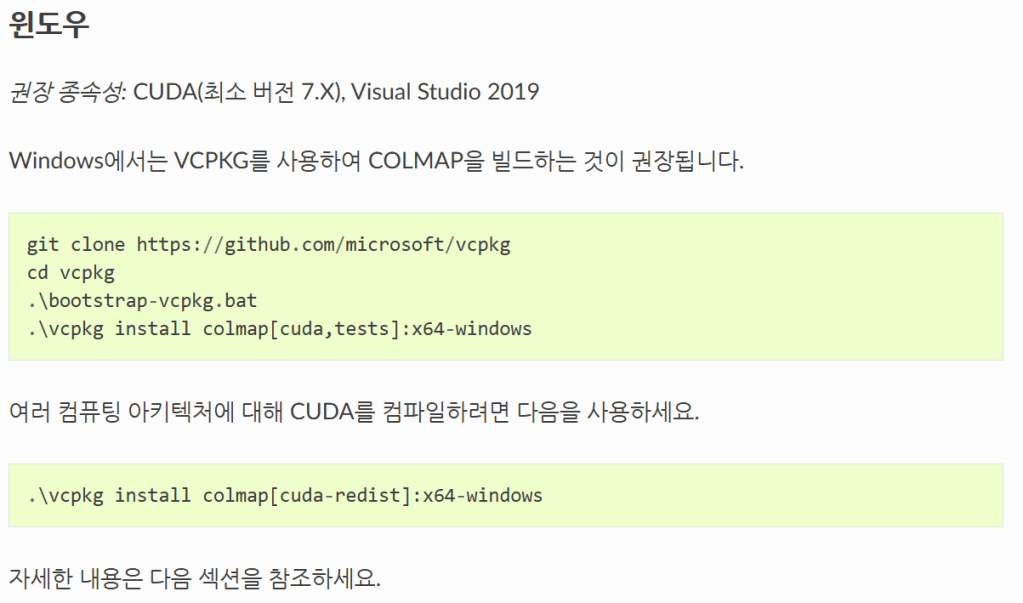
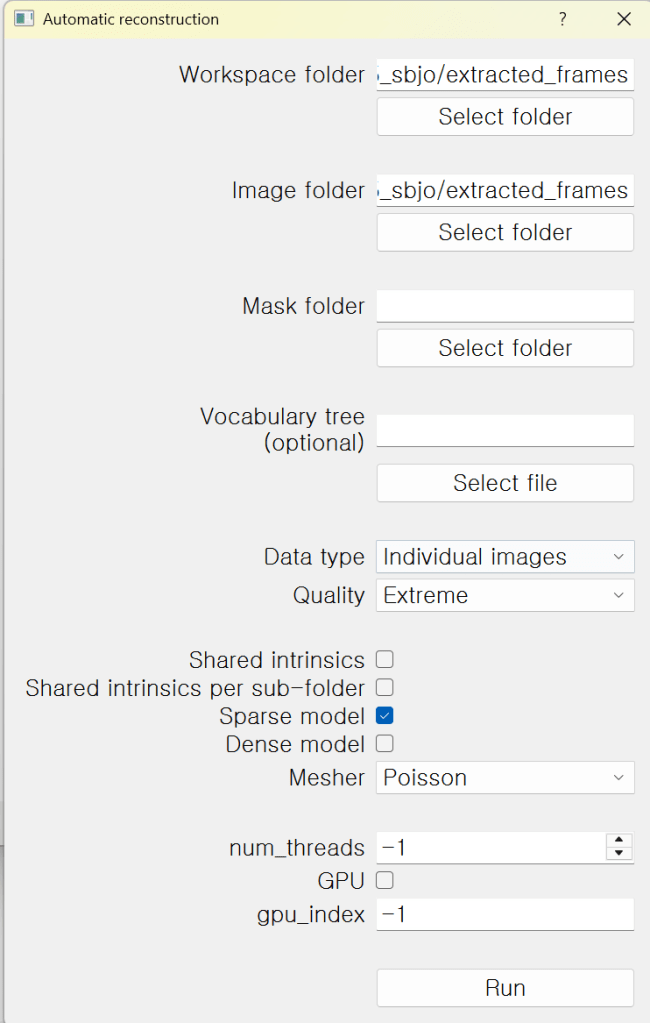
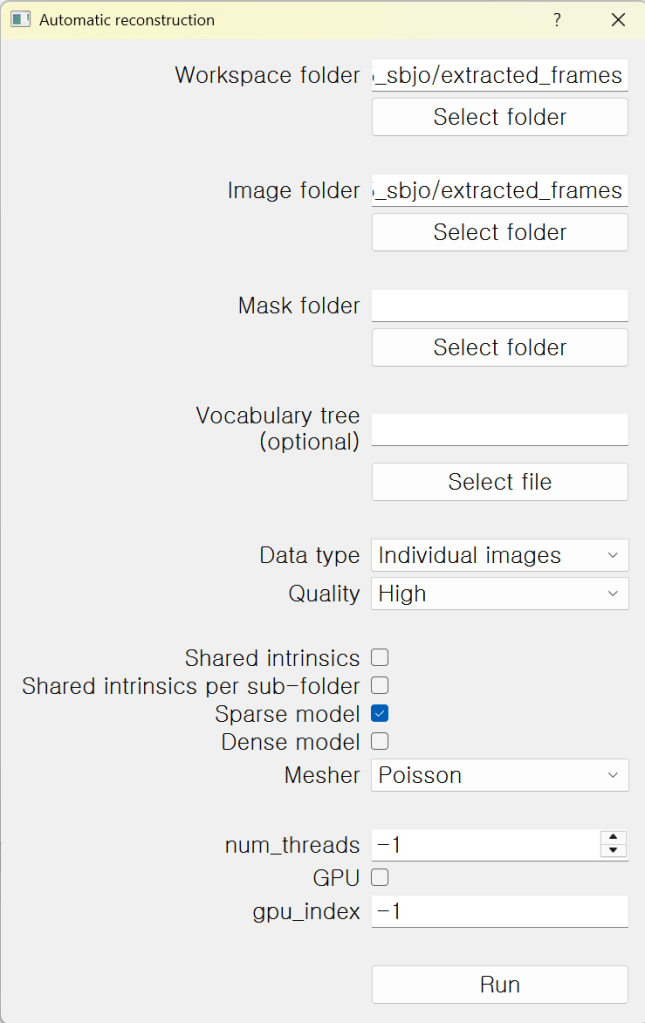
Release binary 활용 colmap-x64-windows-nocuda.zip (CUDA 없이 CPU용)
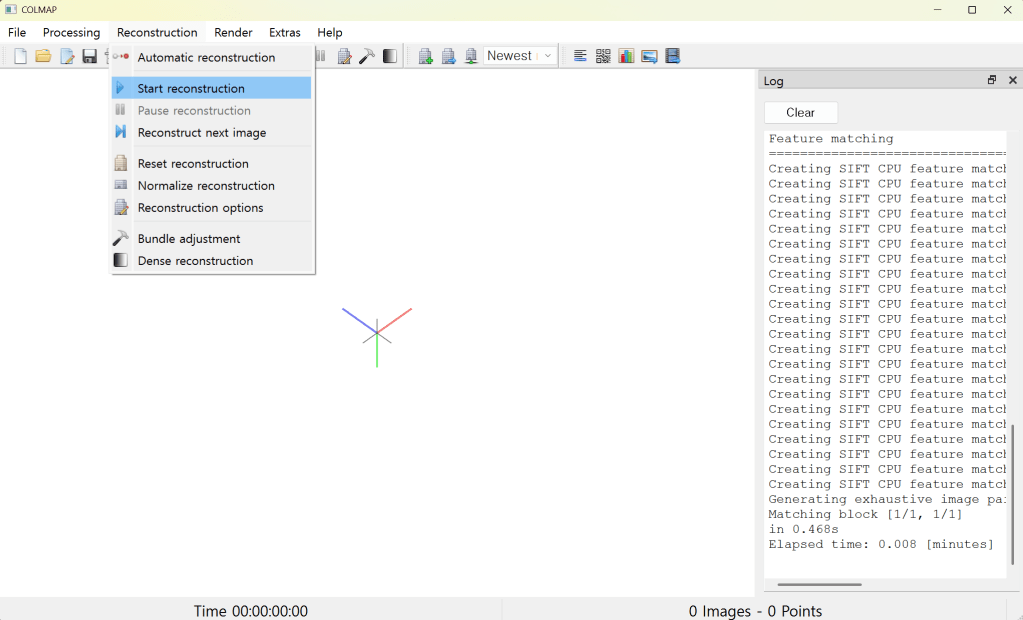
처음에는 소스코드 다운-빌드-설치도 어려워 했었는데 (>.<), COLMAP GUI만 봐도 기쁘다
데이터가 아주 많은 것도 아니고, gpu 서버가 불안정하여 윈도우 cpu 환경에서 빠르게 돌려보기로 함
환경 설정을 하는데 시간이 걸리니까 개인 pc에 대한 로망이 자꾸 생긴다. 지금 노트북 운영체제 단에서 오류가 있어서 완전히 미는 작업이 요구되지만 환경 설정을 다시 해야한다고 생각하면… 일단 논문 작업 끝나고 하는게 좋겠다. ^-^
- 입력 데이터
- 모든 시점의 이미지 해상도를 동일하게 맞추기, png, jpg 포맷으로 변환하여 사용, rgb color space
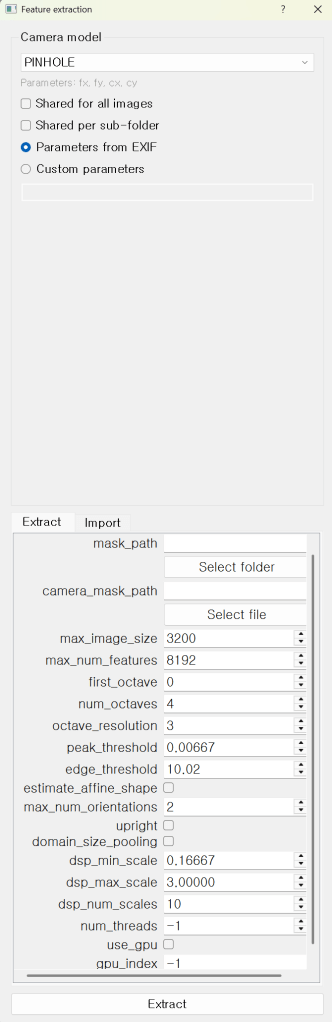
- intrinsics
- focal length, principal point
- 해상도 (width, height)
- distortion 계수 (필요 시)
- 메타데이터 (json)에서 가져와서 설정 값으로 넣기, 없이 자동 추정도 할 수 있지만 정확도 이슈 있음
- extrinsics
- 카메라 pose(position, rotation) 정보는 optional
- sparse reconstruction 단계에서 COLMAP이 자동으로 계산
- 사전에 알면 입력 가능
- 카메라 pose(position, rotation) 정보는 optional
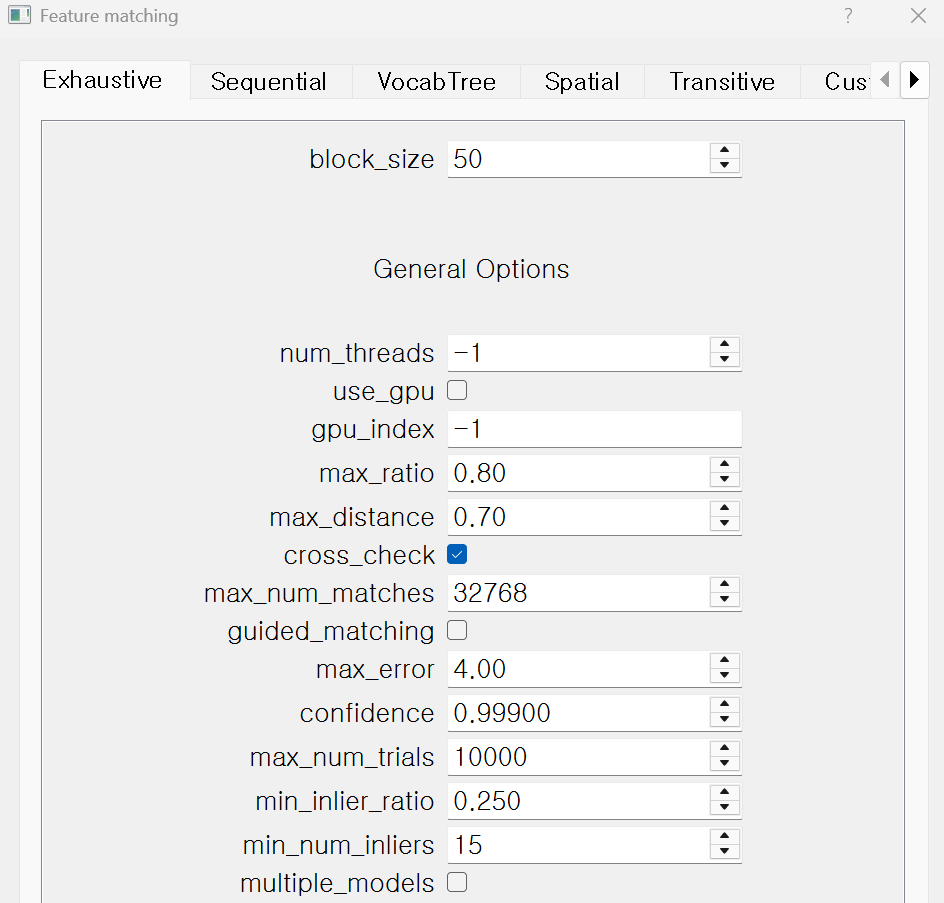
- feature extraction/matching 파라미터
- 촬영 환경에 따라 옵션 조정 필요
- indoor vs outdoor (light conditions)
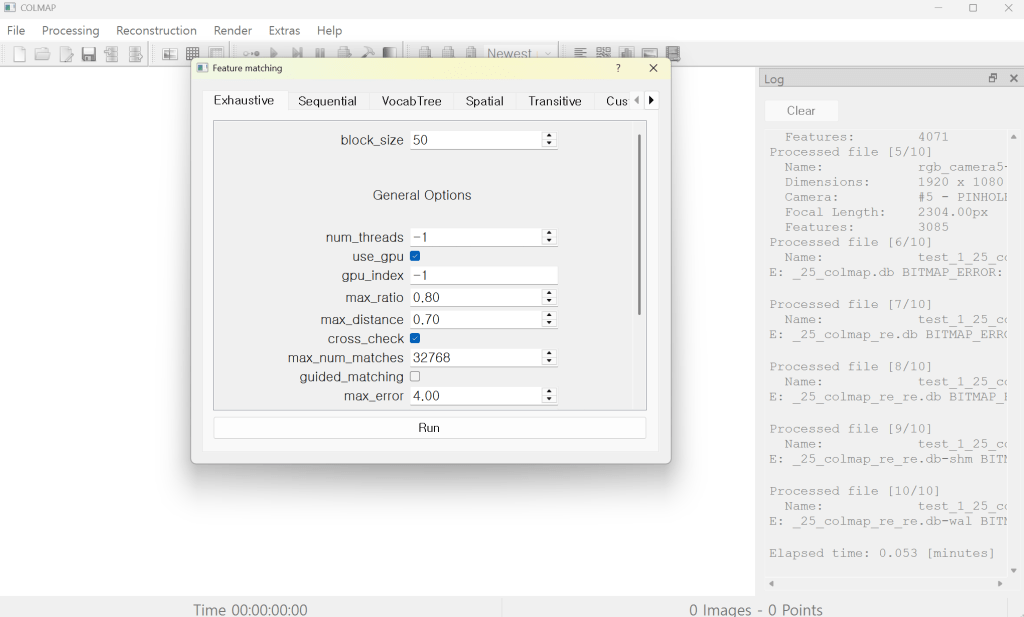
- sequential matching 또는 exhaustive matching (모든 pair 비교)
- 촬영 환경에 따라 옵션 조정 필요
- 컴퓨터 환경
- gpu 환경 (sift gpu 가속 지원)
- colmap 빌드/설치 상태 (cuda 지원)
- 출력 데이터
- sparse/ : sparse point cloud, camera poses
- dense/ : dense point cloud
- project. ini : project config
- camera.txt, images.txt, point3D.txt : 재사용 가능한 최종 매핑 정보
- 3DGS 후속 파이프라인에 연결하여 사용하기
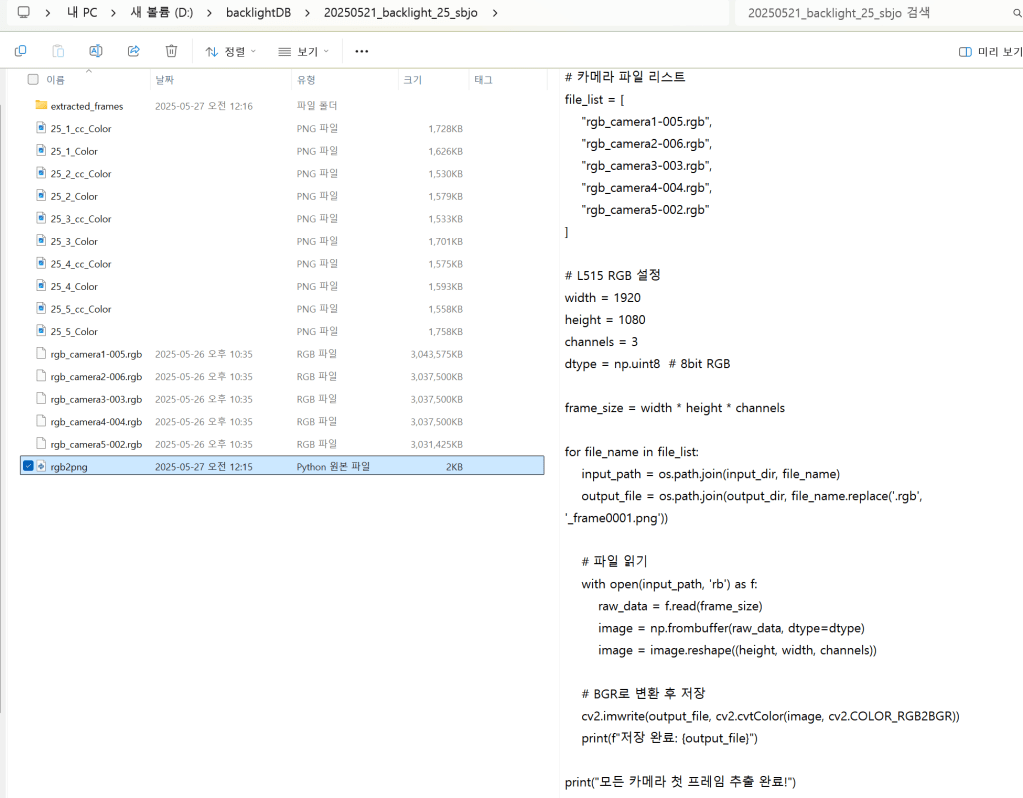
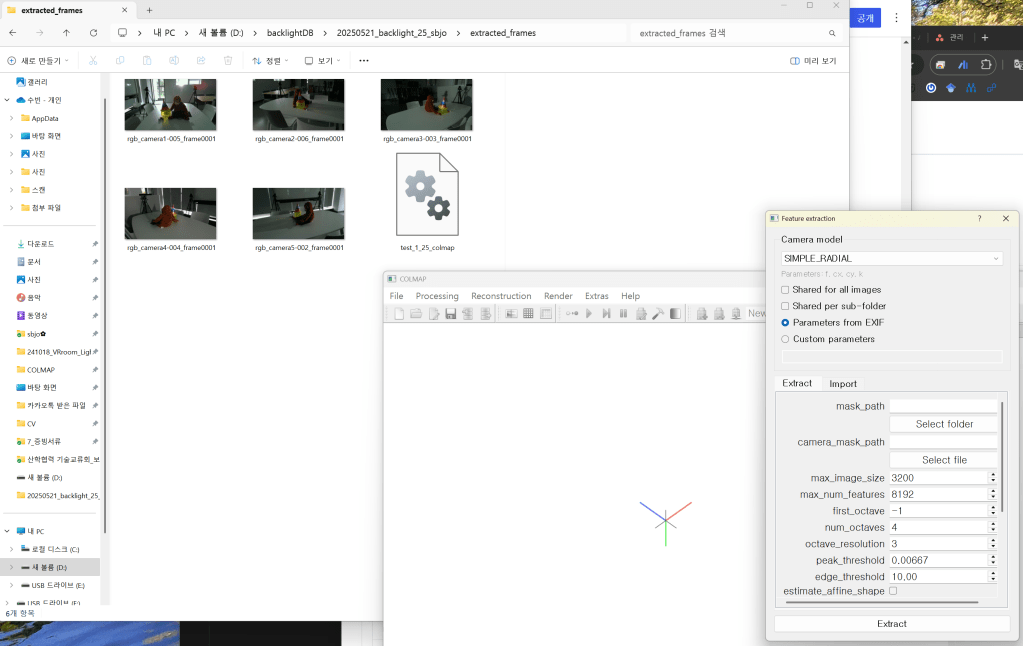
용량이 큰 .rgb 파일에서 첫 번째 프레임만 추출하려면,
- 필요 정보
- 해상도 (width × height): 아마도 1920 × 1080
- 채널 수 (channels): intel realsense의 RGB 스트림은 3채널 (R, G, B)
- 비트 깊이 (bit depth): L515 RGB는 보통 8bit per channel
- np.uint8
- 파일당 프레임 수 (frames_number)
- 데이터 순서 및 포맷: .rgb
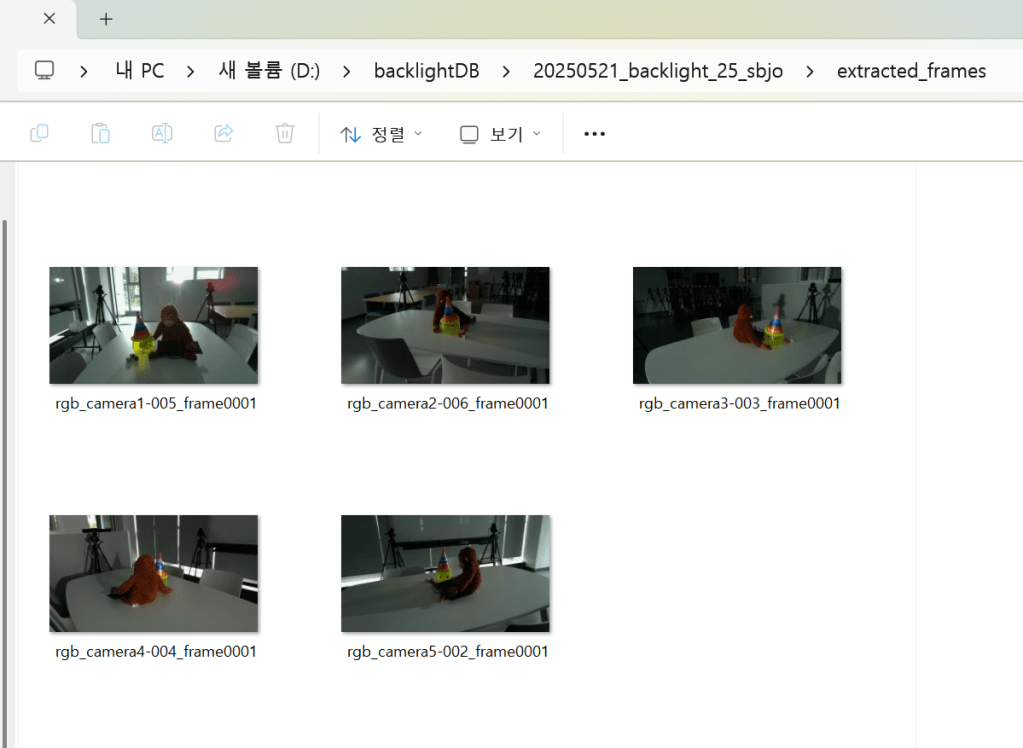
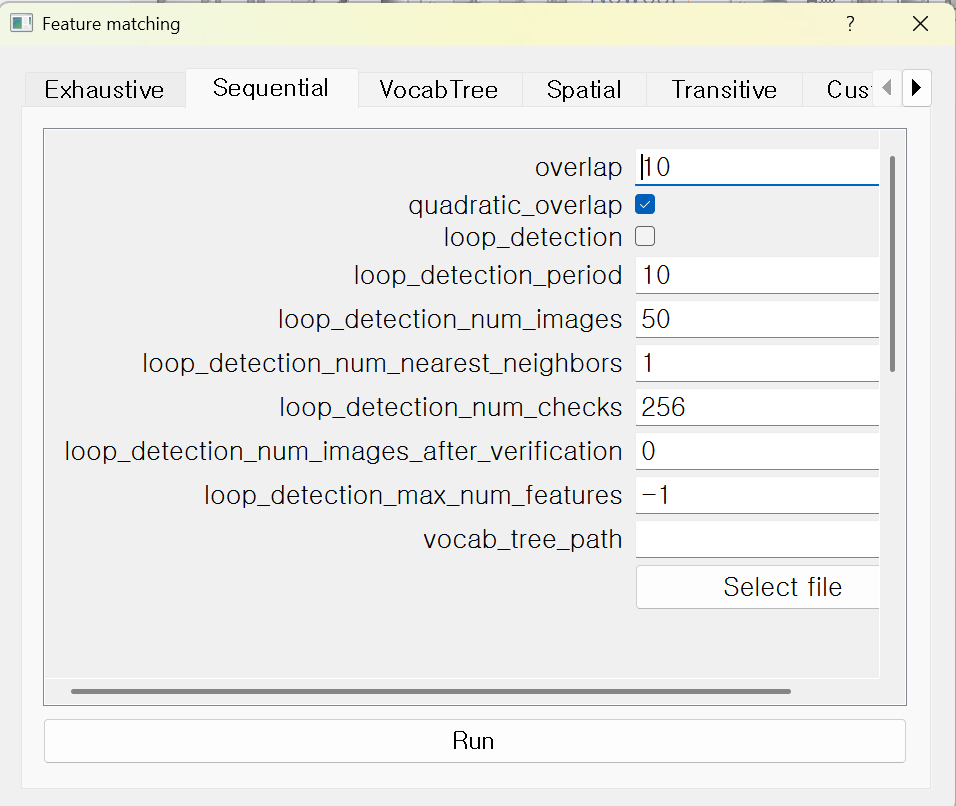
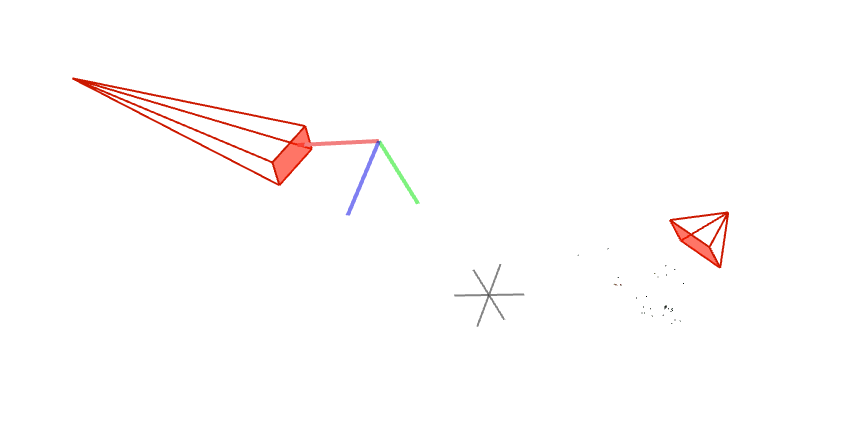
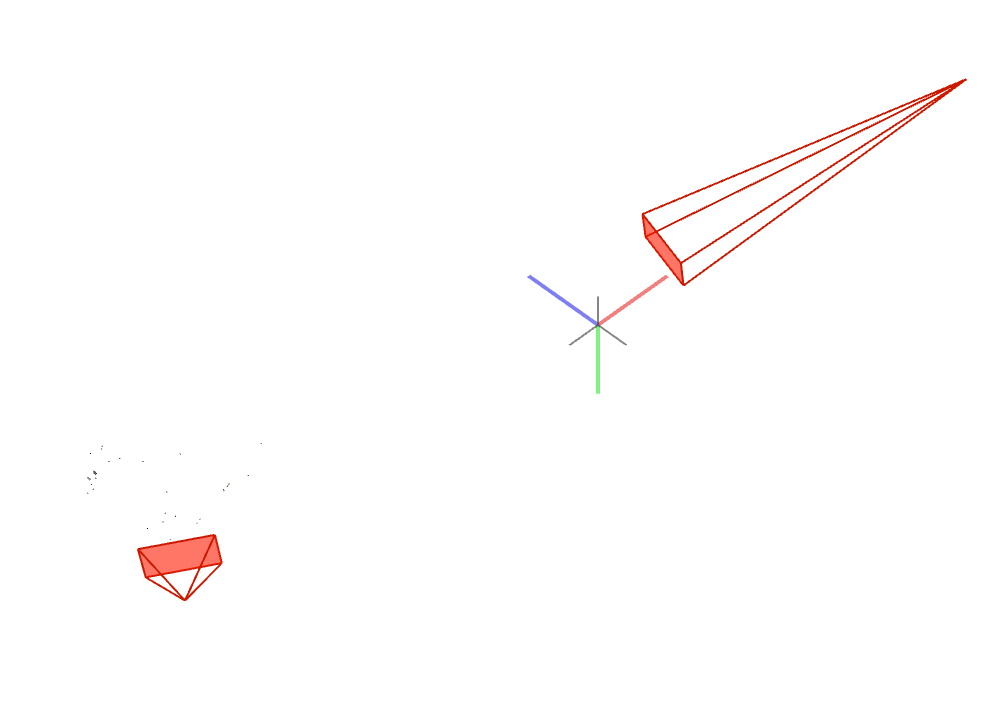
원형 카메라 배열에 최적화 sequential matching
💥 Sequential Matching을 고려하자!
Sequential Matching은:
- 이웃한 카메라들끼리만 매칭
- 예: camera1 ↔ camera2, camera2 ↔ camera3, …, camera5 ↔ camera1
이 방식은 특히 원형 또는 라인형 카메라 배열에 최적화되어 있어.
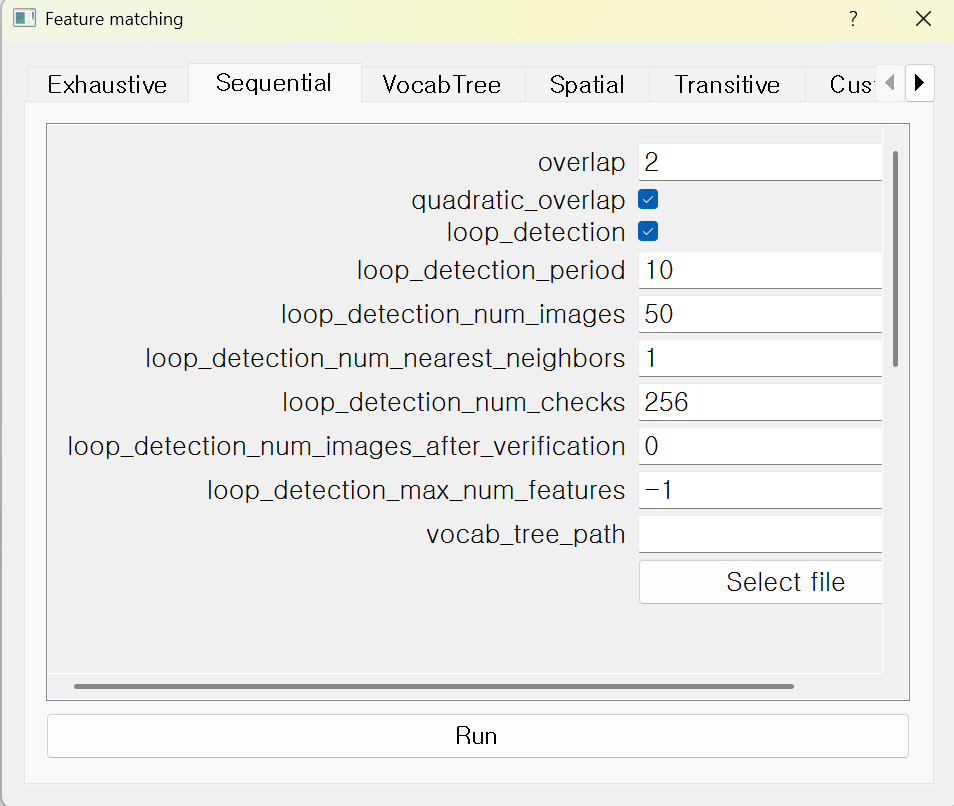
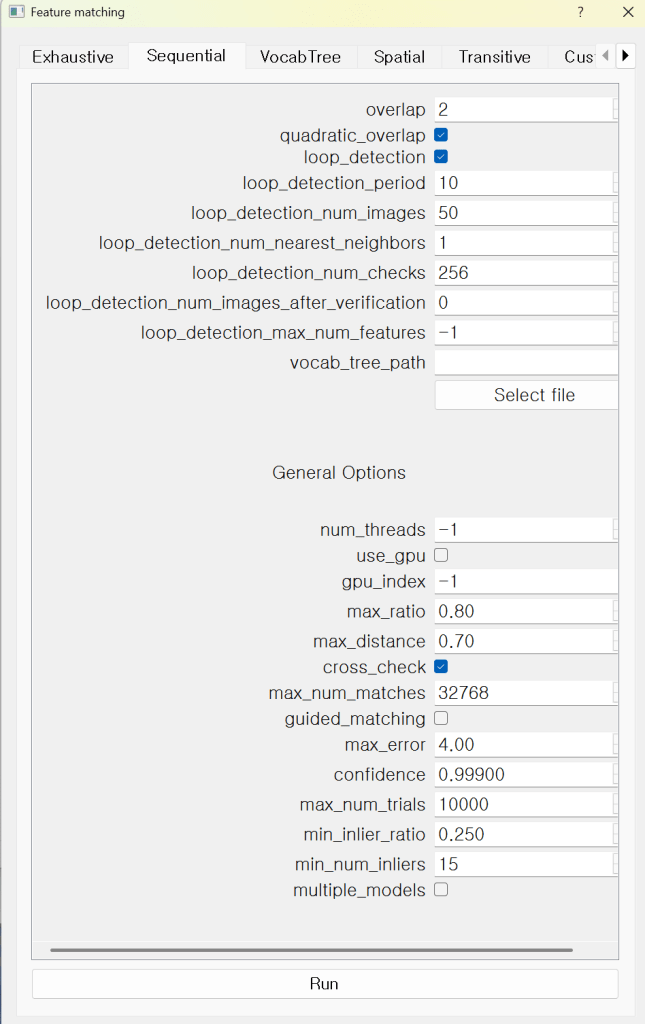
🌟 COLMAP에서 Sequential Matching 실행
1️⃣ Processing → Feature Matching → Sequential 탭으로 이동
2️⃣ 중요한 옵션:
overlap(이웃 카메라 수) → 예: 1 (바로 옆만), 2 (양옆까지)loop detection→ 체크 (camera5 ↔ camera1 연결을 위해)
3️⃣ 나머지는 기본값 OK
4️⃣ Run 눌러서 실행
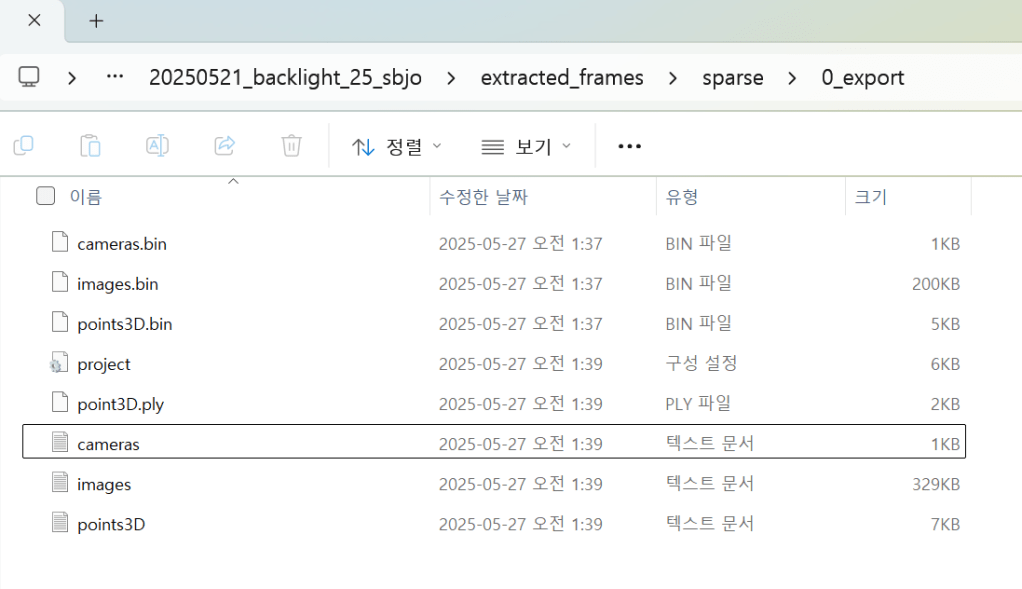
| 파일 이름 | 의미 |
|---|---|
cameras.bin | 각 카메라의 intrinsics (fx, fy, cx, cy, distortion 등) |
images.bin | 각 이미지의 extrinsics (rotation, translation), 이미지 이름, 2D-3D 매칭 포인트 |
points3D.bin | 재구성된 sparse 3D 포인트 클라우드 (좌표, 색상, reprojection error) |
✅ cameras.bin:
카메라 모델 자체 정보 (카메라 기종별로 1개, fx/fy/cx/cy, 왜곡 계수)
✅ images.bin:
이미지별 카메라 위치/방향 + feature 포인트 정보
→ 핵심: pose 정보가 여기 있음
✅ points3D.bin:
Sparse reconstruction 결과로 뽑힌 3D 포인트들
→ 핵심: 3D 씬의 형태를 만드는 좌표들

Leave a comment